Design and Development of an intelligent system for an greenhouse inspecting robot swarm.
- Manuka Suriyage

- Nov 17, 2019
- 3 min read
Updated: May 28, 2020
The system is expected to be designed to monitor the air quality of a green house. This is an on-going research which is basically divided into three stages. The first stage of the project is completed and a research paper is submitted to the ICRAE conference 2020.

Introduction
Nowadays the application of technologies, such as automation, robotics and computing along side artificial intelligence is transforming agriculture. This research is focused on greenhouse farming which involves novel technologies. The objective of greenhouses is to control the conditions of the crops, in order to increase the production and improve the quality. Automating tasks in greenhouse farming has some advantages. First of all, automatic systems can be available all day and night, which is mandatory to correct environmental monitoring, climate control and failure detection. Additionally, these systems can reduce the exposure of human operators to hazardous environments, not only because of the working conditions but also because of some sensitive tasks.
Proposed system
Parameters that are often measured with regards to the environmental conditions in a greenhouse are temperature, humidity, soil moisture and carbon dioxide level in air. In the modern agriculture industry, the measuring process is done using sensors. With the development of robotics, deployment of stationary sensors can be eliminated. Instead, a collection of robots fused with sensing equipment will be deployed to measure the environmental conditions. This manner the capital investment and overall power consumption can be reduced.
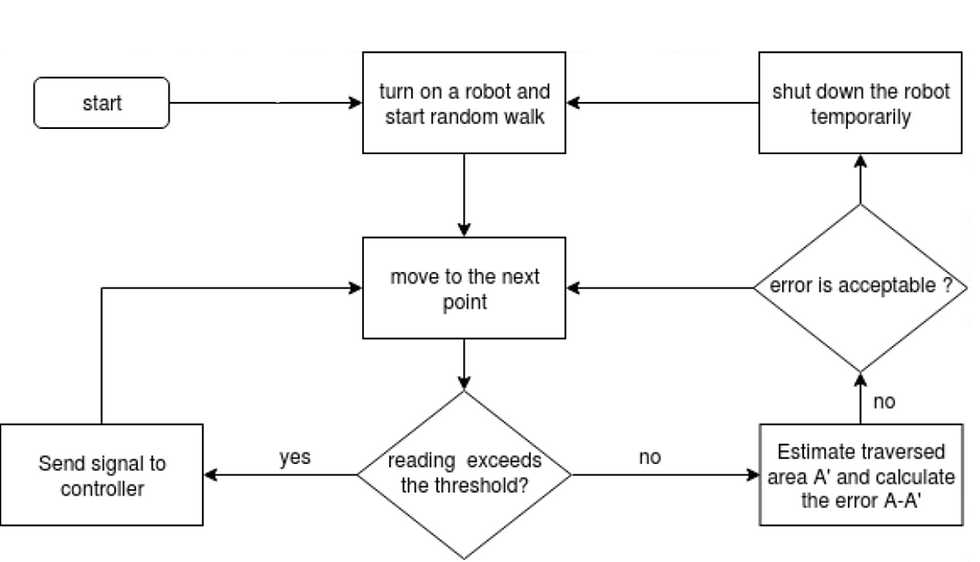
Figure 1: Swarm robot system design
The following section discuss the Initial stage of the project which is the design of the search algorithm of the swarm robot system
First stage of the project involves an algorithm development for the individual random movement of robots to cover a certain area within the greenhouse.
As shown in figure 2 a cluster of N robots are uniformly distributed in the search area P which has n areas of interest. The positions of areas of interest change dynamically. The objective of a robot is to determine the current positions of the regions of interest. The search radius definition, robot movement and the traversed area estimation methods are further discussed in the research paper.
Figure 2: Robot system parameters
The robots movement and the ability to adapt to the environment was simulated using a Java processing 3.3 application and a MATLAB code. Figure 3 shows the simulation environment. The gray canvas in the background represents the heat map of the green house. The variation of the intensity of the background color reflects the heat gradients. The darker a region gets the more the temperature at that point thus, requires cooling down. In the simulation only a single dark area is set, and it is identified as the region of interest.

Figure 3: Java processing 3.3 application to simulate the robot movement
The robot is designed to be used in an environment where self navigation and decision making is critical. Therefore the robot is embedded with a sensor system to identify the obstacles within the working environment. The swarm robots ability to identify the obstacles and the performance of the decision making algorithm was tested using a MATLAB based simulation.

Figure 3: MATLAB simulation for obstacle detection
The second stage of the project is to develop the swarm robot system with the expected functionalities. There are aerial and land robots to cover the entire area of the greenhouse. The ground robots are designed with autonomous capabilities to move around the environment. A Image processing technique and a sensor based object detection system is embedded to the robots. A simple fuzzy system is proposed to monitor the air quality of the greenhouse based on the sensor inputs of environmental parameters. Stage three is to justify the system through testing the swarm robot system in a similar environment as designed.
The Algorithm used to control an individual robot was developed by Hiruna Samarakoon.
Other group members:
Hiruna Samarakoon - Department of Computer Science, UOP.
Yasiru Ranasinghe - Department of electrical and electronic department, UOP.



Comments